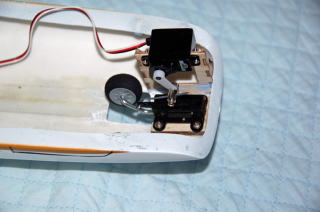
ボディのホイルハウスの切り込み部分が少し小さく
ホイルストッパーがボディと干渉するため少し広げる
位で問題なく完成。
が付くためZ型に加工し出来る限り水平方向に
サーボの力が掛かるようにする、と同時に
引き込みユニット自体が軽く動く様に調整・グリス
アップする。



マウントの制作
説明書では同胞の何枚かのベニヤのマウントを
ボディに穴を開けまずビス止めし他の何枚かを
フレーム側にビス止めした後、両方のベニヤを瞬間
で止めるようになっていますが、印も無いボディへの
穴開け作業はかなり神業の様な・・・・
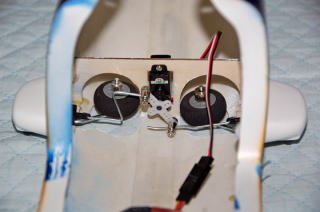
そこで色々考えた挙げ句、ここのマウント部には
着陸時には圧縮方向へ加重となり、飛行時はボディ
を支える位の強度で良いため、マウントはコの字型
のはめ込みとし、コの字型のベニヤを二つ合わせた
状態で下にエポキシを付けフレームの中へ接着する。
前方のマウントは先ずフレームをビスの頭で引っかけ
ベニヤに止め、この状態で裏にエポキシを添付して
ボディへ接着する。この方法であればエポキシが硬化
するまで微妙な位置調整が可能で、機体裏にもビス
の頭が出ずスッキリするし、脱着も上からビス2本外せ
ば直ぐに出来ます。





前の家と違って床がピカピカに光っています!

はリヤのホリゾンタルスタビライザーフィンと干渉する
ため今回もUH-1同様フレキシブルロッド仕様に変更。
この状態で近くの公園でホバリング調整。ラダーサーボ
の位置を決定後、テールギヤボックスを分解しブーム
ごとボディーに組み込み後からギヤボックスを組み立
てる。

別電源として単4ニッケル水素電池を搭載する。

今回はあまり手を掛けないこととします。
かなり足が長い?ので床が高いですねー
重量955gとメタボな機体です。